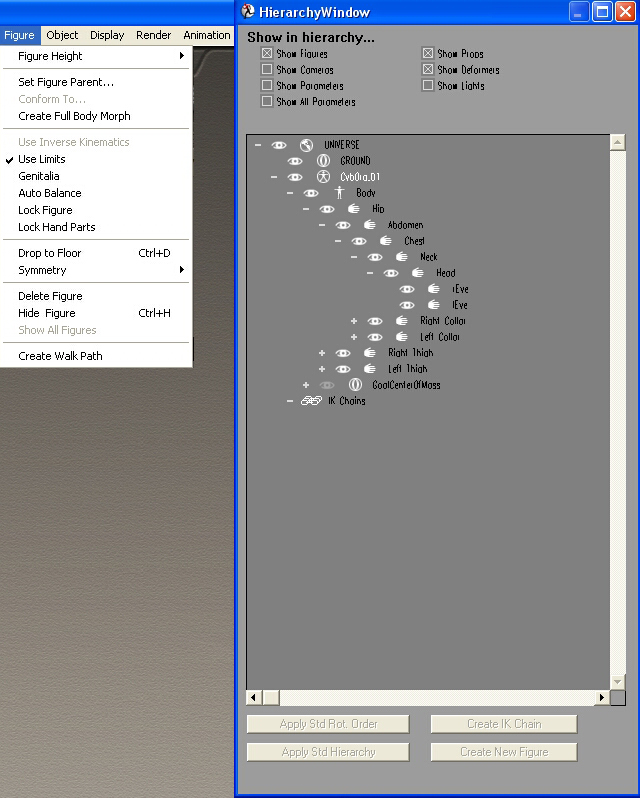
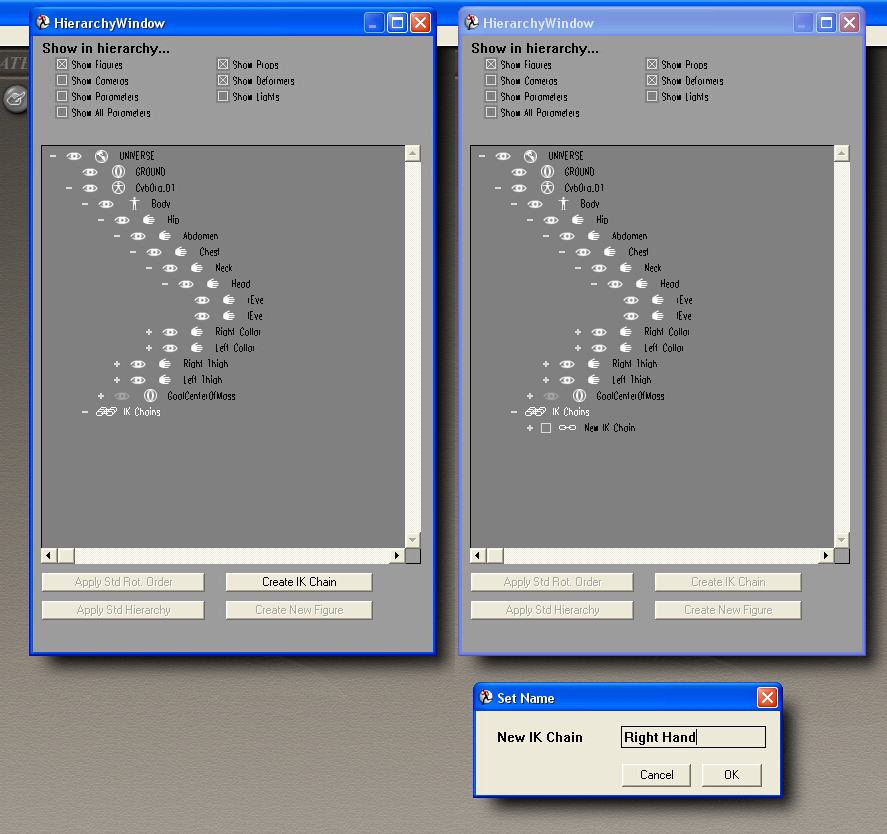
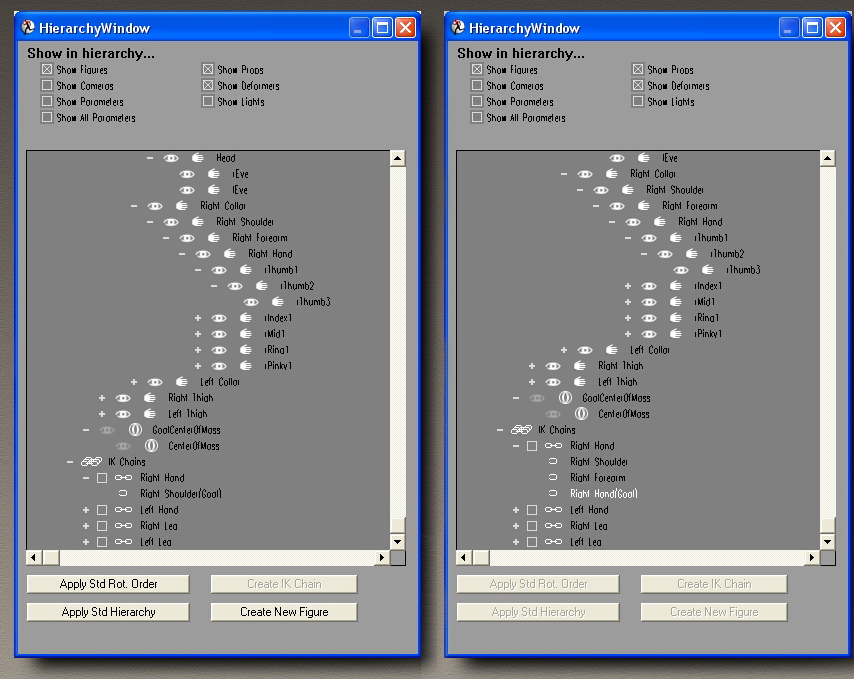
Для создания цепочек придётся действовать методом, хватай-тащи. Никаких команд, типа, Copy – Paste в Hierarchy Window нет. Выбираем часть руки Right Shoulder и нажав левую кнопку мыши, перетаскиваем её в подгруппу Right Hand.
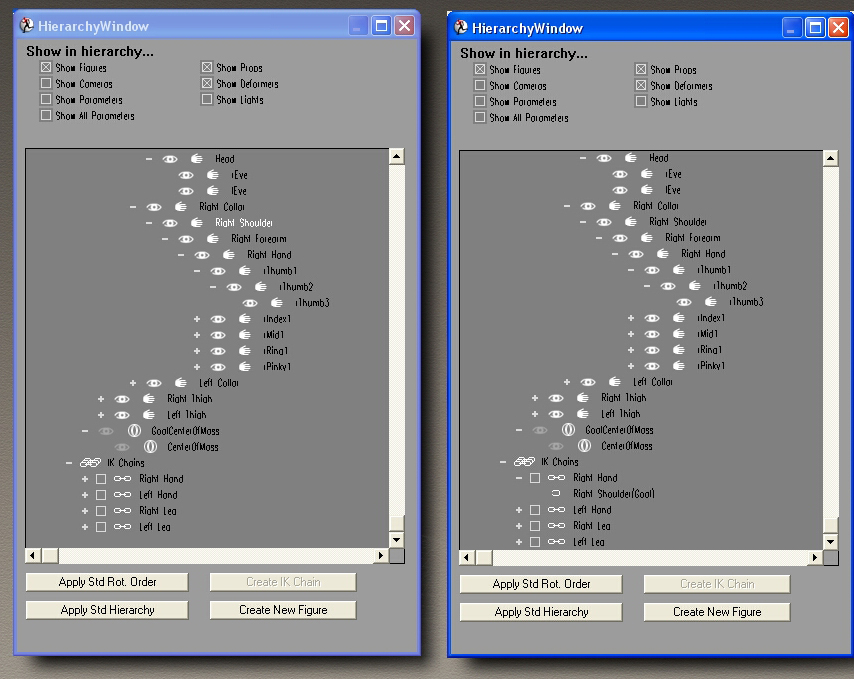
Затем выбираем часть Right Forearm и перетаскиваем её туда же. И наконец, третья часть Right Hand, завершает создание цепочки ИК. При этом, рядом с названием Right Hand, в скобках появится надпись Gool. Это означает, что именно эта часть будет двигать цепочку инверсной кинематики.
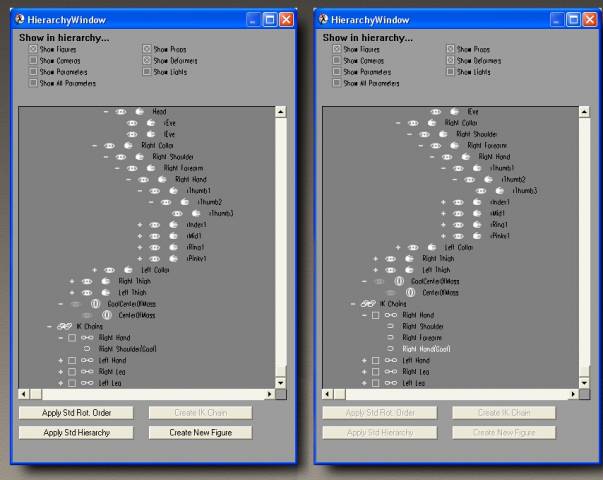
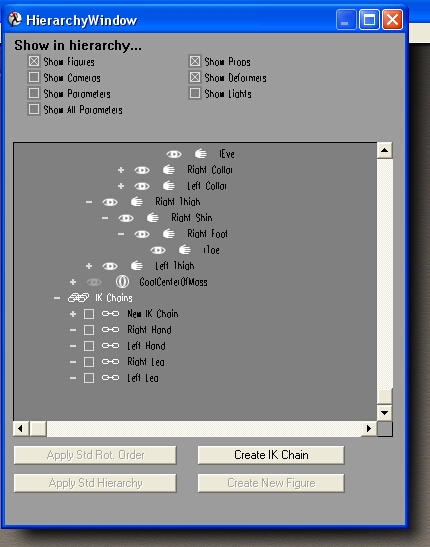
Цепочка ИК создаётся по принципу: для руки – от плеча к кисти руки, для ноги – от бедра к ступне. Если при этом, не перепутать очерёдность, то всё должно получится, примерно так.
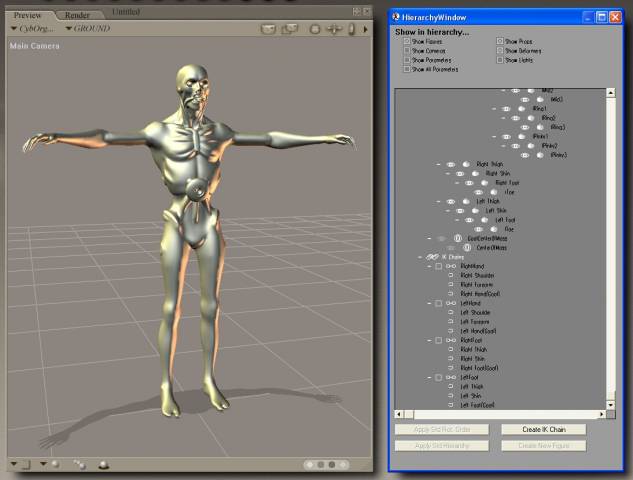
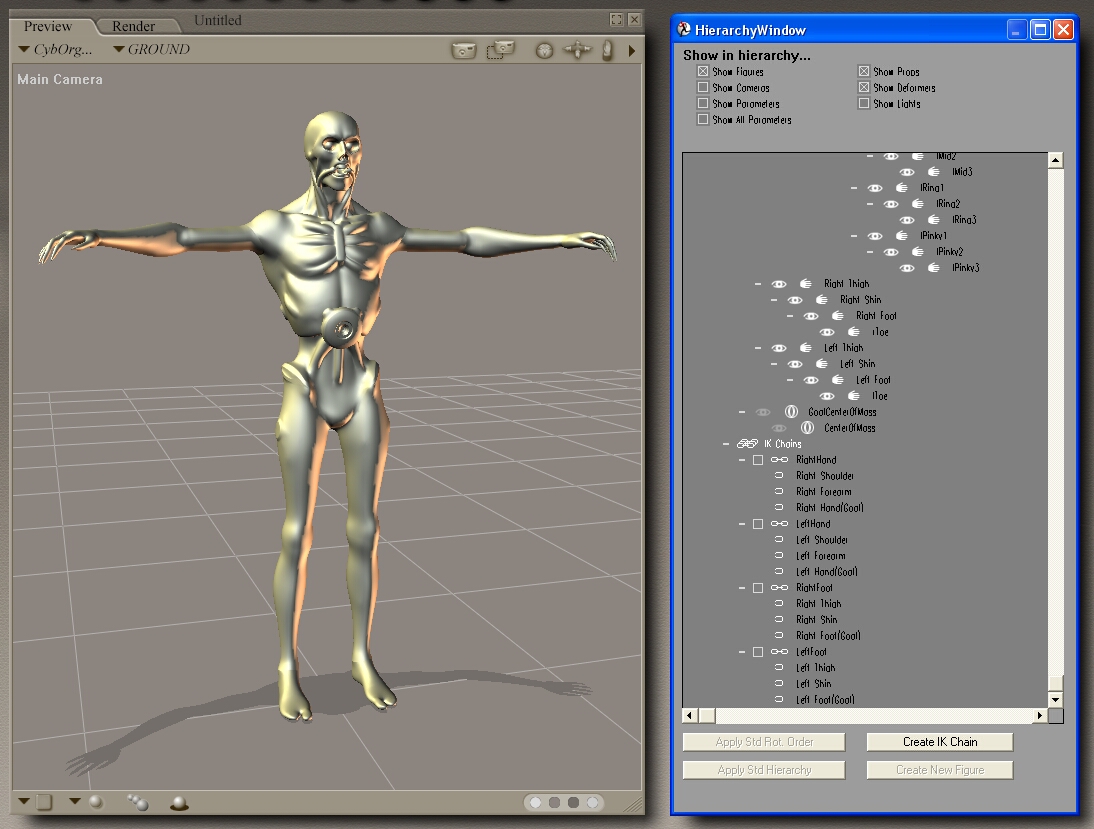
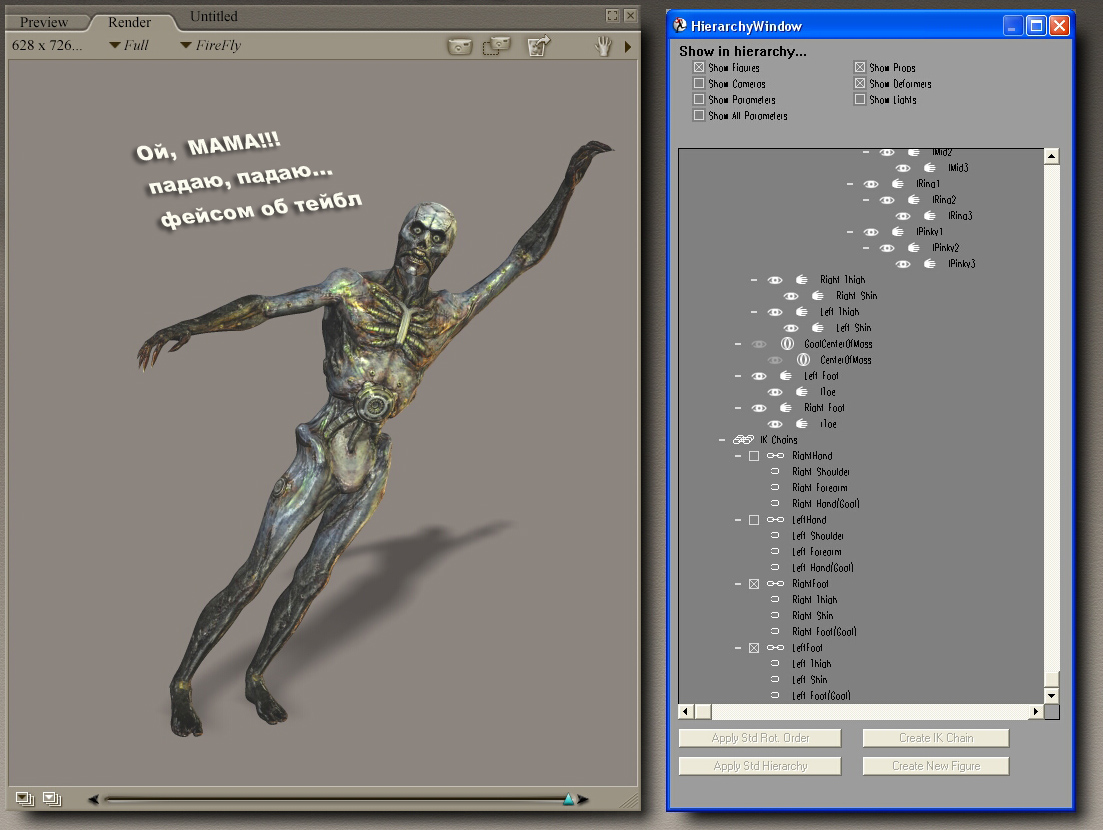
Цепочки ИК созданы, теперь их можно активировать, поставив галочки в нужных местах. Казалось бы, всё, проблема решена, на этом можно и закончить. Но наш инопланетный киборг, не был бы, инопланетным киборгом, если бы, не подкинул очередную незадачу. При активации режима ИК для ног, ступни фигуры «примерзли» к полу, и при попытки сдвинуть фигуру с места, она падает.
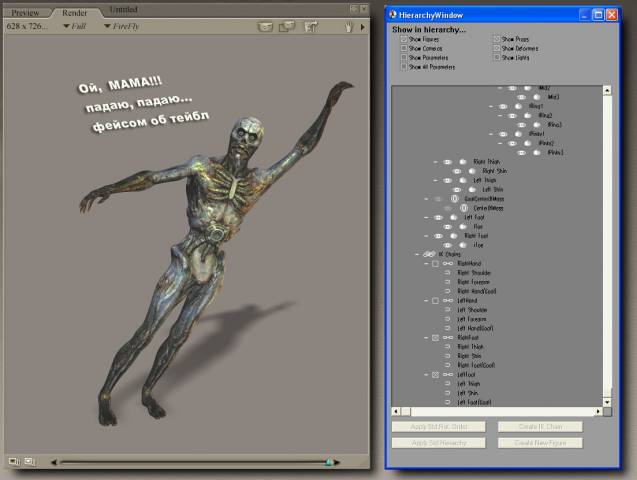
Надо сказать, прилипшая к полу фигура, для программы Poser, весьма редкое явление. Видимо в этом и кроется одна из причин того, что у данной фигуры нет режима ИК, не для рук, не для ног. И вызвана эта проблема ошибкой CR2 файла, которая возникает по причине неправильного экспорта из программы DAZ Studio. Всё дело в том, что в момент активизации режима ИК для ног, включается режим лимитов, который наоборот должен отключатся. У большинства моделей лимиты на ограничение вращения и передвижения, работают не в режиме ИК. Собственно, у рук данной модели всё как надо, а вот с ногами произошла какая-то путаница. При этом догадаться, что во всём виноваты лимиты ограничения движения, крайне сложно. Никакой галочки, в выпадающем меню Figure, напротив пункта Use Limits, не стоит.
И так, посмотрим, что там с лимитами намудрили. Выбираем ногу фигуры, режим движения zTran, нажимаем стрелочку справа, выбираем пункт Settings. Открывается панель Edit Parameter Dial. Именно здесь можно увидеть, какие у нас выставлены лимиты.

В данном случае стоит лимит, от нуля - до нуля. Ну, что тут сказать, очень большой разброс параметров. Не удивительно, что данная модель так широко шагает. Чтобы понять, какой нужно выставить лимит для движения, его нужно сравнить с оригинальным лимитом для фигуры Виктории 4. А её лимиты таковы:
Value: 1.632193
Min Limit: -26212802.124023
Max Limit: 26212802.124023
Именно это, и нужно вбить, в соответствующее строчки панели Edit Parameter Dial, для всех осей движения. И тогда модель Киборга, не только пойдёт в нужном вам направлении, она воспарит как бабочка над поверхностью земли, к которой только что, была «приклеена насмерть».
О чём этот урок? О единичном случае криво собранной модели? Не совсем. Подобная проблема возникла у меня и после экспорта фигуры Виктории 5, из DAZ Studio в Poser. Значит, это проблема не только с фигурой Виктории 4, это тенденция. А раз так, то нужно знать, как с этой тенденцией бороться.